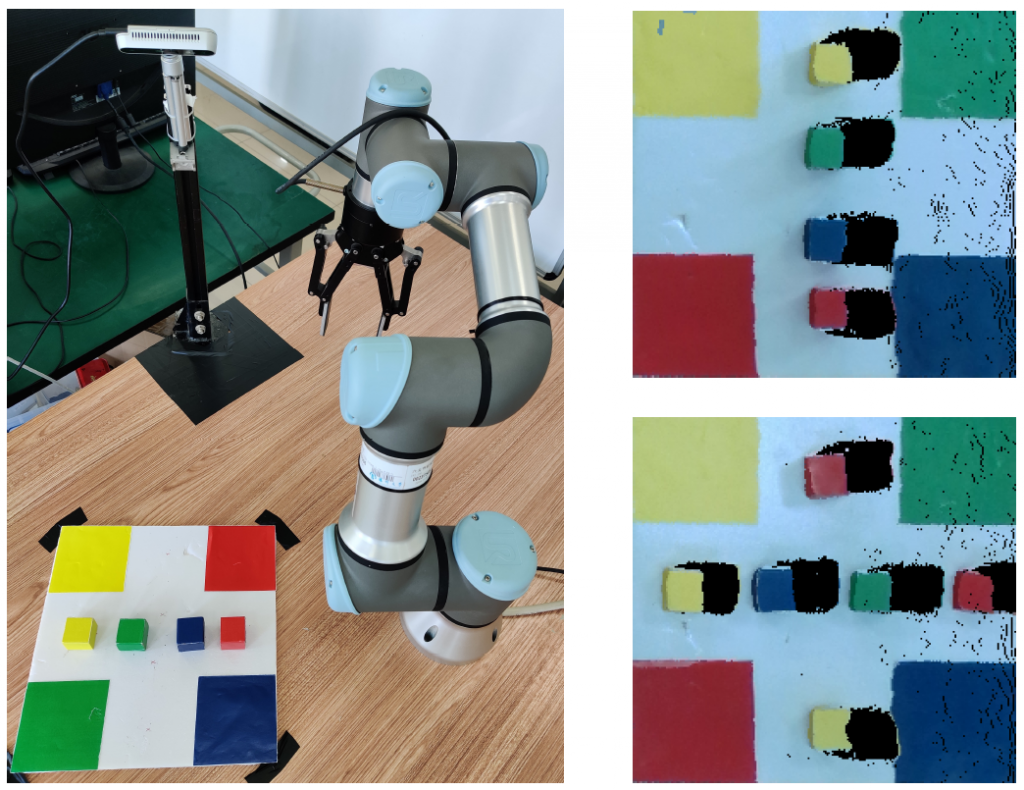
Fig 1. Real-world robot setup and testing scenes for object sorting tasks.
The robot setup includes a Universal Robot UR3 with a Robotiq 2-finger gripper, and an Intel RealSense D415 camera. Considering the limited working area of UR3 robot, we set the size of workspace as 0.28×0.28m2. On the corners of the robot workspace, 4 square plates each of which has an area of 0.09 × 0.09 m2 are placed for holding the objects to be sorted. Here, we design two testing scenes shown as two colored heightmap images generated from our system. The two testing scenes contain 4 and 6 blocks to be sorted, respectively.