Learn Multi-Step Object Sorting Tasks through Deep Reinforcement Learning
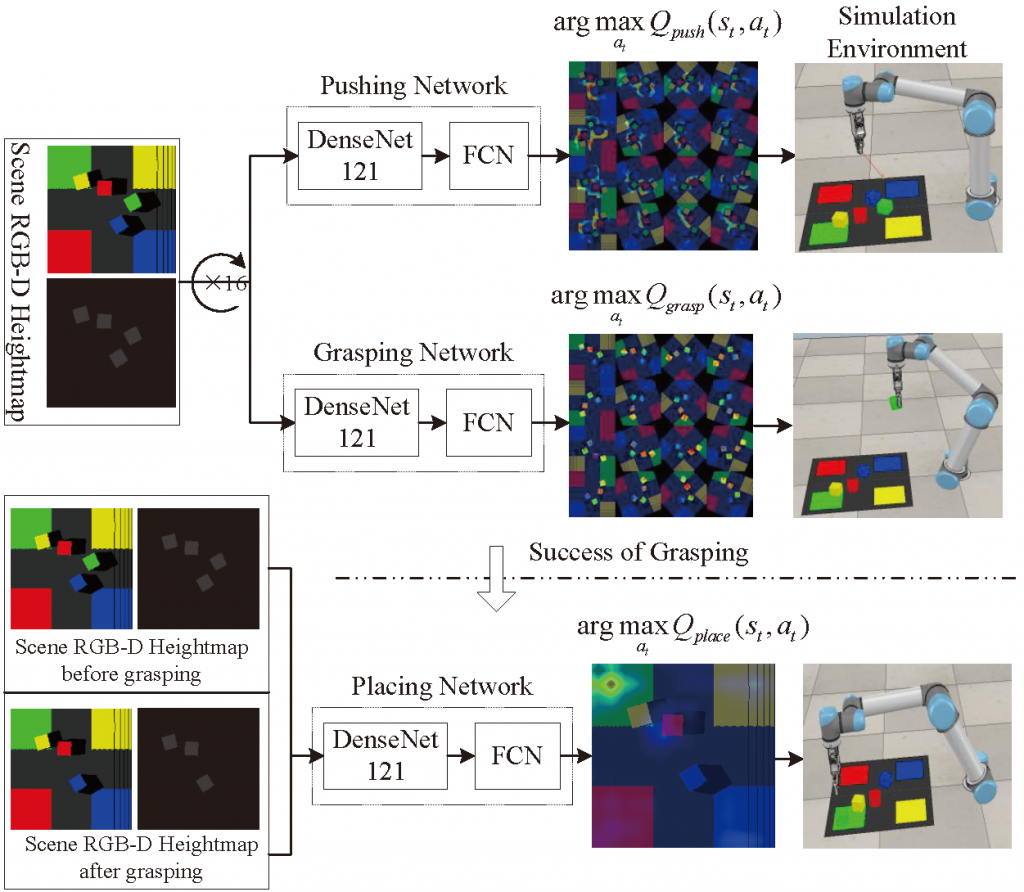
Robotic systems are traditionally controlled to repetitively perform specific actions for manufacturing tasks. These control methods are usually domain-dependent and model-dependent and cost lots of human efforts. They cannot meet the emerging requirements of generality and flexibility in many areas such as intelligent manufacturing and customized production. This paper develops a general model-free approach to enable robots to perform multi-step object sorting tasks through deep reinforcement learning. Taking projected heightmap images from different time steps as input without extra high-level image analysis and understanding, critic models are designed for producing a pixel-wise Q value map for each type of action. It is a new trial to apply pixel-wise Q value based critic networks on solving multi-step sorting tasks that involve many types of actions and complex action constraints. The experimental validations on simulated and realistic object sorting tasks demonstrate the effectiveness of the proposed approach.
This work is open-sourced at https://github.com/JiatongBao/DRLSorting.